
Kompjuterski vid daje preciznost robotu
Inovatori u NASA-inom svemirskom centru Džonson (JSC) razvili su softver za kompjuterski vid koji brzo izvodi određivanje položaja mete, a zatim daje uputstva operateru kako da pravilno uskladi robotski krajnji efektor sa metom za koju pokušavaju da se uhvati u koštac.

Kao dodatna prednost, mogućnost identifikacije objekata softvera takođe može pomoći u otkrivanju fizičkih nedostataka na ciljevima. Ova tehnologija je prvobitno kreirana da pomogne operaterima robotske ruke na Međunarodnoj svemirskoj stanici (ISS) koja se više oslanjala na manevre sa instrukcijama koje su izvodili kontrolori leta na zemlji u Centru za kontrolu misije JSCs (MCC).
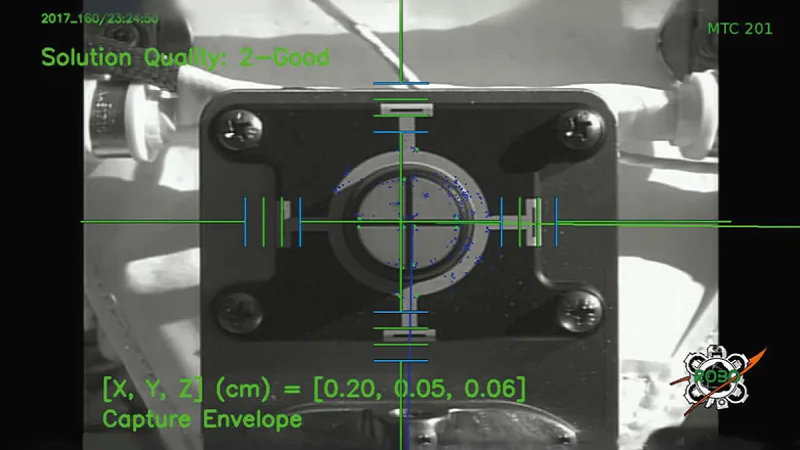
Uprkos pomoći računarskih modela za predviđanje poravnanja i robotske ruke i mete, često su bile potrebne iterativne procedure ponovnog poravnanja da bi se ispravile neuspele operacije hvatanja, što je koštalo dragoceno vreme. Da bi rešio ovaj problem, NASA-in softver za kompjuterski vid analizira prenos kamere uživo sa jedne boreskopske kamere robotske ruke i pruža operateru delta komande potrebne za idealnu operaciju hvatanja.
Ovaj proces je potpomognut komponentom mašinskog učenja koja prati fid kamere za bilo koji od potencijalnih ciljnih uređaja ISS-a. Kada se odredi ciljni uređaj, odgovarajuća kamera i parametri cilja se automatski sekvenciraju kako bi se pripremili za operacije hvatanja.
Softver uključuje komponentu mašinskog učenja koja koristi obučenu regionalnu konvolucionu neuronsku mrežu (r-CNN) kako bi pružila mogućnost analize uživo kamere kako bi se odredile mete ISS uređaja sa kojima operater robotske ruke može da komunicira na orbiti.
Ova karakteristika ima za cilj da poveća operativni domet hvatanja glavne robotske ruke ISS-a sa prethodnog maksimuma od 0,5 m za određene tipove ciljeva, na više od 1,5 m, uz značajno smanjenje vremena izračunavanja za operacije hvatanja.
Industrijska automatizacija i robotske aplikacije koje se oslanjaju na rešenja kompjuterskog vida mogu naći vrednost u mogućnostima ovog softvera. Širok spektar novih zemaljskih robotskih aplikacija, van kontrolisanih okruženja, takođe može naći vrednost u sposobnostima dinamičkog prepoznavanja objekata i određivanja stanja ove tehnologije, što je uspešno demonstrirala NASA u orbiti.
Izvor: techbriefs.com
