
Na putu ka prvom letećem humanoidnom robotu
Istraživači sa Italijanskog instituta za tehnologiju (IIT) nedavno su istraživali fascinantnu ideju, stvaranje humanoidnih robota koji mogu da lete.

Glavna svrha – rad u uslovima različitih katastrofa
Međutim, da bi efikasno kontrolisali kretanje letećih robota, objekata ili vozila, istraživačima su potrebni sistemi koji mogu pouzdano proceniti intenzitet potiska koji proizvode propeleri, što im omogućava da se kreću kroz vazduh. Pošto je sile potiska teško direktno izmeriti, one se obično procenjuju na osnovu podataka koje prikupljaju senzori na samom objektu. Tim u IIT-u je nedavno predstavio novi framework koji može da proceni intenzitet potiska letećih sistema sa više tela koji nisu opremljeni senzorima za merenje potiska.
Ovaj framework, predstavljen u radu objavljenom u IEEE Robotics and Automation Letters, mogao bi im na kraju pomoći da naprave svog letećeg humanoidnog robota čija bi glavna svrha bila rad u uslovima različitih katastrofa, gde bi mogli da izvrše spašavanje preživelih, a do njih je teško doći zbog potencijalnih poplava i požara oko njih. Ključni cilj nedavnog rada bio je da osmisli robota koji može da manipuliše objektima, hoda po zemlji i leti. Kako mnogi humanoidni roboti mogu i da manipulišu objektima i da se kreću po zemlji, tim istraživača je odlučio da proširi sposobnosti humanoidnog robota i da uključi let, umesto da razvija potpuno novu robotsku strukturu. Jednom kada budu imali sposobnost letenja, humanoidni roboti bi mogli da lete od jedne zgrade do druge izbegavajući krhotine, požar i poplave.
Framework za procenu potiska koji su kreirali istraživači značajno pojednostavljuje dizajn njihovog letećeg robota i smanjuje njegovu cenu proizvodnje, jer ne zahteva ugradnju senzora sile na svaki od mlaznih motora koji ga pokreće. Umesto procene potiska koristeći podatke senzora sile, framework kombinuje dva različita izvora informacija u jedan proces procene. Prvi izvor informacija koji koristi je izveden modelom koji povezuje komande poslate mlaznom motoru sa rezultujućim potiskom. Drugi izvor informacija koji koristi framework za procenu potiska je takozvani ‘centroidni momentum’ celog robota. Ovo je poznata vrednost koju koriste robotičari koji razvijaju humanoidne sisteme za kontrolu i procenu njihovih kretanja. Ako bi se koristili pojedinačno, oba izvora informacija koje koristi framework tima imala bi značajna ograničenja.
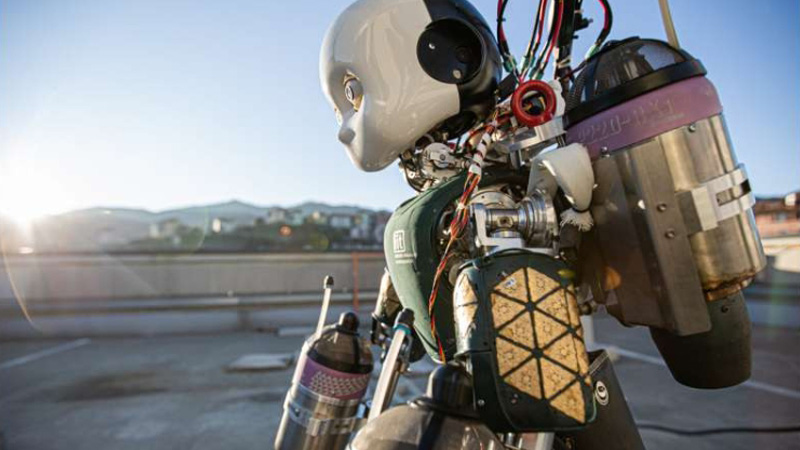
Na primer, model vođen podacima koji su koristili mogao bi tačno da proceni potisak samo ako je mlazni motor uvek radio na potpuno isti način. Međutim, mlazni motori mogu raditi drugačije na osnovu različitih faktora okoline. Istraživački tim je koristio Kalmanovo filtriranje da kombinuje oba pristupa kako bi prevazišli njihove individualne nedostatke. Da bi procenili efikasnost svog frameworka, istraživači su ga testirali na novorazvijenom robotu zvanom iRonCub, evoluciji iCub robota sa integrisanim mlaznim motorima. Dok su istraživači do sada samo testirali framework za procenu potiska na humanoidnom robotu iRonCub, on bi se takođe mogao primeniti na druge leteće robote sa različitim strukturama tela. Ovo uključuje leteće robote koji se mogu rekonfigurisati, sisteme koji mogu promeniti oblik ili konfiguraciju da bi izvršili određene radnje.
Ako se primeni na leteće kutije na mlazni pogon, framework za procenu potiska koji su razvili istraživači mogao bi da otvori nove mogućnosti za isporuku različitih proizvoda na udaljenim lokacijama, uključujući hranu i farmaceutske lekove. U međuvremenu, tim planira da nastavi rad na iRonCub-u, fokusirajući se na njegove mogućnosti letenja. Nadaju se da će na kraju predstaviti prvog pouzdanog humanoidnog robota visokih performansi sposobnog i za kopneno i za vazdušno kretanje.
Izvor: Techxplore
