
Nova metoda za poboljšanje planiranja kretanja robota
Kao i mi, roboti ne mogu da vide kroz zidove. Ponekad im je potrebna mala pomoć da dođu tamo gde idu. Inženjeri na Univerzitetu Rajs razvili su metod koji omogućava ljudima da pomognu robotima da „vide“ svoje okruženje i izvršavaju zadatke.

Strategija pod nazivom Bayesian učenje u mraku (BLIND) je novo rešenje za dugogodišnji problem planiranja kretanja za robote koji rade u okruženjima gde nije sve jasno vidljivo sve vreme.
Algoritam koji su razvili Carlos Quintero-Peña i Constantinos Chamzas sa Rajsove škole inženjeringa George R. Brown, oba diplomirani studenti, drži čoveka u petlji kako bi povećao percepciju robota i, što je još važnije, sprečio izvođenje nebezbednog kretanja.
Da bi to uradili, kombinovali su Bayesianovo inverzno učenje pojačanja sa utvrđenim tehnikama planiranja pokreta kako bi pomogli robotima koji imaju visoke stepene slobode.
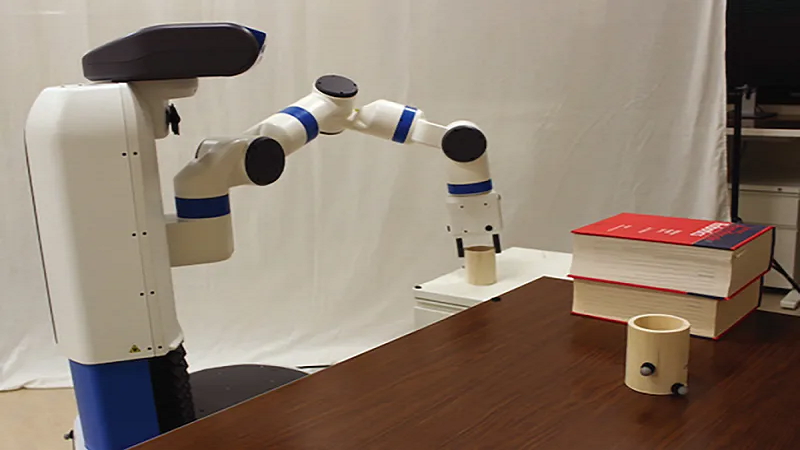
Da bi testirala BLIND, laboratorija Rajs je uputila Fetch robota, zglobnu ruku sa sedam zglobova, da zgrabi mali cilindar sa stola i premesti ga na drugi, ali je pri tome morao da prođe pored barijere. „Ako imate više zglobova, uputstva za robota su komplikovana“, rekao je Quintero-Peña. „Ako usmeravate čoveka, možete samo da kažete: ‘Podigni ruku’.
Ali programeri robota moraju biti specifični u pogledu kretanja svakog zgloba u svakoj tački njegove putanje, posebno kada prepreke blokiraju „pogled“ mašine na njenu metu.
Umesto da unapred programira putanju, BLIND ubacuje ljudski srednji proces da precizira koreografske opcije ili najbolja nagađanja, koje predlaže robotov algoritam. „BLIND nam omogućava da uzmemo informacije u ljudskoj glavi i izračunamo naše putanje u ovom prostoru visokog stepena slobode“, rekao je Quintero-Peña. „Koristimo specifičan način povratne informacije koji se zove kritika, u osnovi binarni oblik povratne informacije gde se čoveku daju oznake na delovima putanje“, rekao je on.
Ove oznake se pojavljuju kao povezane zelene tačke koje predstavljaju moguće putanje. Dok BLIND korača od tačke do tačke, čovek odobrava ili odbija svaki pokret da bi poboljšao putanju, izbegavajući prepreke što je efikasnije moguće. Robot koristi ove informacije za planiranje i kada bude nagrađen odobrenim setom pokreta, može da izvrši svoj zadatak.
Izvor: techbriefs.com
