
Ova robotska ruka može da odvoji svoju šaku kako bi dohvatila predmete
Istraživači sa Švajcarskog saveznog instituta za tehnologiju u Lozani (EPFL) razvili su artikulisanu šaku koja može da produži domet robotske ruke tako što se odvaja i samostalno puzi kako bi dohvatila predmete.

Robotska šaka može samostalno da se kreće, hvata male objekte i vraća ih nazad ka ruci
Ovo istraživanje je nedavno predstavljeno na Međunarodnoj konferenciji o robotici i automatizaciji (ICRA), a zapaženo je i od strane magazina IEEE Spectrum.

Zbog svoje snage i brzine, robotske ruke su obično trajno pričvršćene za podove ili druge strukture radi dodatne stabilnosti, što ograničava njihov domet. Cilj istraživanja, sprovedenog u Laboratoriji za algoritme učenja i sisteme (LASA) na EPFL-u, bio je da se razvije bimodalna robotska šaka sa proširenim sposobnostima hvatanja, uključujući povremenu nezavisnost od robotske ruke na koju je priključena.
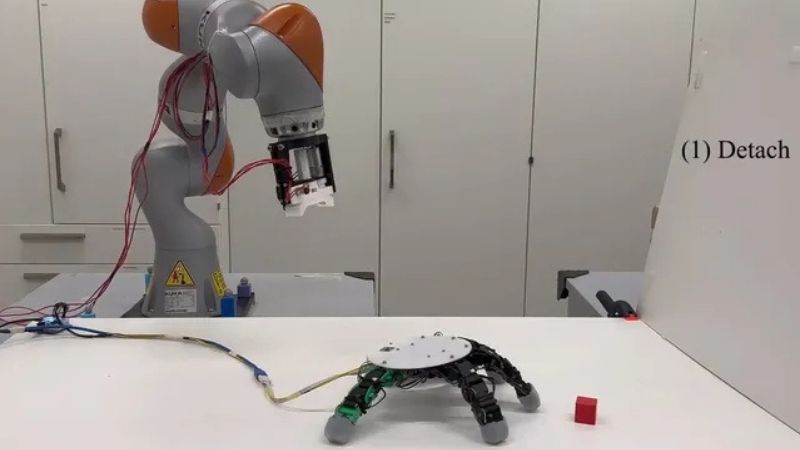
Kratak video prikazuje robotsku šaku koja se odvaja od robotske ruke i zatim stoji na svojim prstima.
Šaka se može odvojiti i ponovo pričvrstiti na robotsku ruku po potrebi. Robotske šake su obično dizajnirane s jednim ciljem – da drže predmete. Da bi razvili šaku koja bi to mogla, a ujedno i da puzi samostalno kao „Stvar” iz Porodice Adams, istraživači su kreirali i usavršili osnovni dizajn koristeći genetski algoritam (koji se oslanja na biološke trikove poput prirodne selekcije i evolucije) i MuJoCo simulator fizike kako bi testirali praktičnost različitih iteracija.
Algoritam i simulacije su pomogli istraživačima da odrede optimalan položaj i broj artikulisanih prstiju, što se ispostavilo da je pet, u rasporedu sličnom ljudskoj ruci. Robotska šaka takođe koristi magnetni konektor na zglobu, omogućavajući joj da se autonomno pričvrsti i odvoji od ruke.
Robotska ruka sa veštom, višefunkcionalnom šakom prikazana je u kratkom videu kako podiže dva predmeta odjednom.
Prsti robotske šake mogu se savijati u oba pravca, što joj omogućava da puzi, ali i da hvata dva predmeta odjednom kada je pričvršćena za robotsku ruku.
Prsti šake mogu da se savijaju u oba smera, što joj omogućava da koristi neke prste za podizanje predmeta dok ostali funkcionišu kao male noge. Ovaj dizajn takođe proširuje upotrebljivost šake dok je priključena za robotsku ruku. Može podizati više predmeta odjednom, bez potrebe da okreće ruku kako bi ponovo pozicionirala neiskorišćene prste.
Šaka je takođe znatno manja od robota poput Spot-a kompanije Boston Dynamics, koji može slobodno da se kreće koristeći četiri noge. Spot je već nadograđen sopstvenom robotskom rukom i hvataljkom, ali sa artikulisanom šakom koja radi nezavisno, mogao bi biti bolje opremljen za istraživanje ili analizu područja u koja Spot ne može da se provuče.
Izvor: Theverge