
Fleksibilna robotska ruka koju vode AR naočare
Istraživači sa Imperijal koledža u Londonu kreirali su fleksibilnu robotsku ruku koju pojedinac može da vodi koristeći naočare proširene stvarnosti (AR).

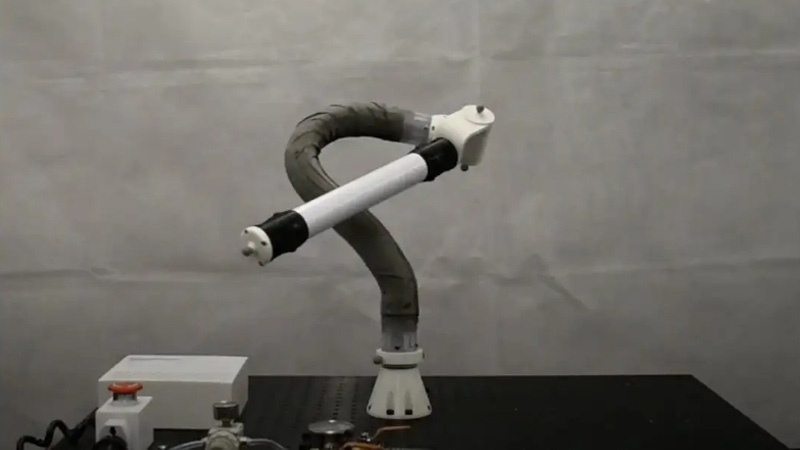
Mala težina i nežnost čine je pogodnom za širok spektar poslova
Veoma prilagodljiva robotska ruka može se uvijati i okretati u svim pravcima i koristiti u oblastima kao što su održavanje svemirskih letelica, proizvodnja i rehabilitacija povreda. Ljudi su mogli ručno da savijaju ruku robota u željeni oblik za svaki zadatak, a to je moguće zahvaljujući slojevima mylar listova koji se nalaze unutra. Svaki od ovih mylar listova klizi jedan preko drugog i može se zaključati.

Da bi prevazišao neke od izazova, tim istraživača u Imperial-ovoj laboratoriji REDS (Robotic Manipulation: Engineering, Design, and Science) dizajnirao je sistem tako da korisnici mogu da se oslone na AR da bi konfigurisali robota. Uz pametne naočare mešovite realnosti i kamere za praćenje pokreta, korisnicima se predstavljaju šabloni i dizajni koji su postavljeni na okruženje stvarnog sveta. Ruka robota se zatim može podesiti tako da odgovara šablonu. Da bi stvari bile još lakše, šablon postaje zelen kada se postigne uspešna konfiguracija, a robot se zaključava na mestu.
Jedno od ključnih pitanja u prilagođavanju ovih robota je tačnost u njihovoj novoj poziciji. Mi ljudi nismo sjajni u osiguravanju da nova pozicija odgovara šablonu, zbog čega smo potražili pomoć od AR-a, rekli su istraživači. Pokazali smo da AR može da pojednostavi rad zajedno sa našim savitljivim robotom. Pristup korisnicima pruža niz pozicija robota koje se lako kreiraju, za sve vrste aplikacija, bez potrebe za toliko tehničkog znanja. Sistem je testiran na pet muškaraca starosti 20-26 godina sa iskustvom u robotici. Međutim, nisu imali iskustva sa manipulisanjem savitljivim robotima. Prema objavljenom radu, uspeli su da uspešno i precizno podese robota sa novim sistemom.
Postoji mnogo aplikacija za ovakav sistem, kao što su proizvodnja i održavanje vozila. Mala težina ruke čini je posebno primenljivom za održavanje svemirskih letelica, a njena nežnost omogućava da se koristi u rehabilitaciji povreda. Na mnogo načina može se posmatrati kao odvojena, savijena, treća ruka. To bi moglo pomoći u mnogim situacijama u kojima bi dodatni ud mogao biti od koristi i pomoći u preraspodeli opterećenja. Istraživači će nastaviti da rade na poboljšanju robota i njegovog AR-a, i pokušaće da uvedu dodirne i audio elemente kako bi povećali tačnost robota. Drugi veliki cilj je ojačati robote, jer oni postaju manje kruti kada su zaključani u položaju. Ove karakteristike mogu uticati i na preciznost i na tačnost.
Izvor: Unite