
Učenje robota da se kreću nacrtanim putanjama
Da bi roboti obavili čak i jednostavan zadatak, potrebno je mnogo posla iza scene. Deo izazova je planiranje i izvođenje pokreta, sve od okretanja točkova do podizanja robotske ruke. Da bi se ovo desilo, robotisti sarađuju sa programerima kako bi razvili skup putanja – ili puteva – koji su bez prepreka i izvodljivi za robota.

William Zhi, postdoktorski saradnik na Institutu za robotiku Univerziteta Carnegie Mellon (RI), koji radi sa dr. student Tianyi Zhang i direktor Instituta za robotiku Matthew Johnson-Roberson kreiraju nove načine za crtanje ovih putanja koristeći skice da pokažu robotima kako se kreću.

“Tradicionalni pristupi generisanju putanja kretanja robota zahtevaju specifično programiranje robota“, rekao je Zhi. „Ljudi mogu zaključiti složena uputstva kroz skice. Mi nastojimo da osnažimo robote da urade isto.“
Postojao je preliminarni rad koji proučava korišćenje prirodnog jezika za kontrolu robota, ali istraživači su prvenstveno testirali različite načine da nauče robote da uče kroz demonstraciju. Postoje dva glavna načina da se ovo uradi. Jedna metoda se oslanja na kinestetičko učenje, gde čovek beleži kuda robot ide, a zatim fizički prilagođava robota da postavi svoje zglobove u željene položaje. Drugi pristup je teleoperacija, gde korisnik manipuliše robotom pomoću specijalizovanog daljinskog upravljača ili džojstika, a zatim snima demonstraciju da bi robot kopirao.
Obe metode imaju svoje nedostatke. Kinestetička nastava zahteva da korisnik bude u istom prostoru kao i robot. Takođe je teško ručno podesiti neke robote – a ta poteškoća se samo povećava sa mobilnim robotima, kao što je četvoronožni robot sa rukom pričvršćenom za njega. A teleoperacija zahteva od korisnika da ima preciznu kontrolu, tako da je potrebno vreme da robot prođe kroz korak.
Pristup RI tima za skiciranje putanja uči robota kako da se kreće bez nedostataka kinestetičkog učenja ili teleoperacije. U ovoj novoj metodi, robot uči iz pokreta nacrtanih na slici okoline u kojoj će raditi.
Da bi snimio sliku okruženja, tim je postavio kamere na dve lokacije kako bi slikao iz različitih perspektiva. Zatim su skicirali putanju željenog kretanja robota na slici i pretvorili 2D slike u 3D modele koje je robot mogao da razume. Ovu konverziju su uradili pomoću tehnike koja se zove praćenje zraka, koja koristi svetlost i senke na objektima da bi procenila njihovu udaljenost od kamere.
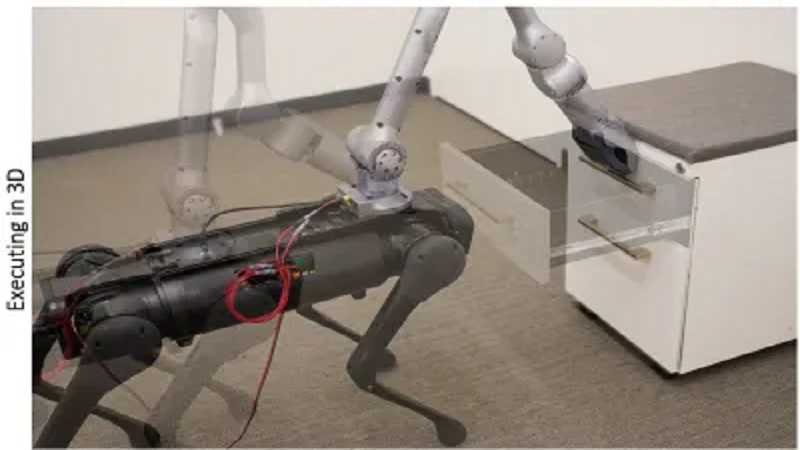
Kada je tim generisao 3D modele, dali su ih robotu da ga prati. Za četvoronožnog robota opremljenog robotskom rukom, istraživači su skicirali tri putanje kretanja na svakoj fotografiji koju su snimili, pokazujući kako ruka treba da se kreće. Pretvorili su slike u 3D modele koristeći praćenje zraka, a ruka je zatim naučila da prati ove putanje u stvarnom svetu.
Koristeći ovu tehniku, tim je obučio svog četvoronožnog robota da zatvara fioke, skicira slovo “B”, prevrne kutiju i još mnogo toga. Takođe su ga programirali da otvori hvataljku na kraju određenih putanja, što mu omogućava da ubacuje predmete u kutije ili šolje. Štaviše, oni mogu generalizovati pokrete kojima podučavaju robota u mnogim zasebnim zadacima.
„U mogućnosti smo da naučimo robota da uradi nešto, a zatim ga prebacimo u drugu početnu poziciju, i on može da preduzme istu akciju“, rekao je Zhi. „Možemo dobiti prilično precizne rezultate.
Trenutno, ova metoda radi samo na robotima sa krutim zglobovima, a ne na mekim robotima, jer treba da uzme u obzir uglove zglobova i kako oni odgovaraju različitim tačkama u prostoru. Ali bavljenje hardverom dolazi sa sopstvenim skupom izazova. “Ljudi na terenu su se više fokusirali na algoritme za bolje pokrete iz demonstracije. Naše istraživanje je, s druge strane, početak korišćenja skica putanje za podučavanje robota”, rekao je Zhi. „Zamišljamo buduće proizvodne postavke, u kojima bi neko nevešt u programiranju robota mogao skicirati na iPad-u, a zatim kolaborativno raditi sa robotom.
Izvor: techbriefs.com